

























核心技术
双目视觉引导
基于立体视觉成像技术
实现无序状态的精准抓取
-
柔性控制算法
机械手可自适应不同材质、形状的物体
-
人机协同系统
通过视觉实时感知人体位置,确保作业安全距离

技术应用
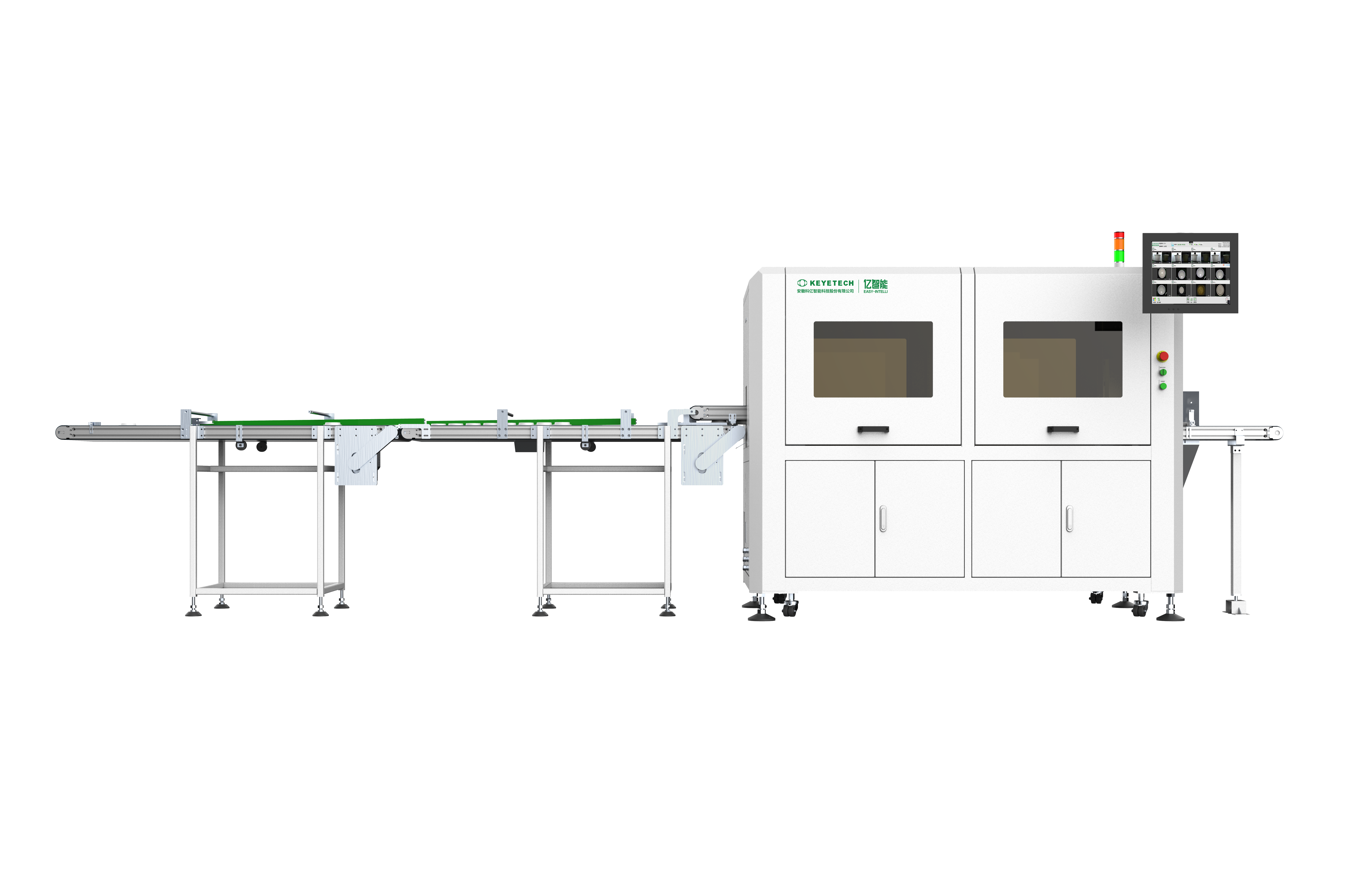
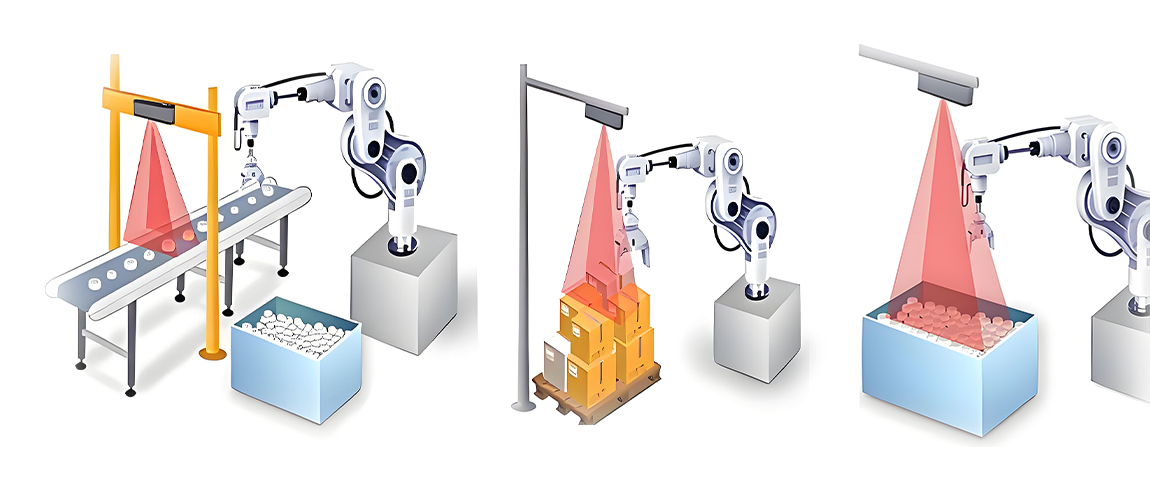
视觉定位,无序抓取
视觉定位,无序抓取
KEYETECH视觉系统识别待抓取的物体,KEYETECH成像技术提供物体的精确三维信息,由机器人技术负责执行抓取和放置操作。
适用范围:用于对散乱、无序堆放的物体进行自主识别、定位和抓取。
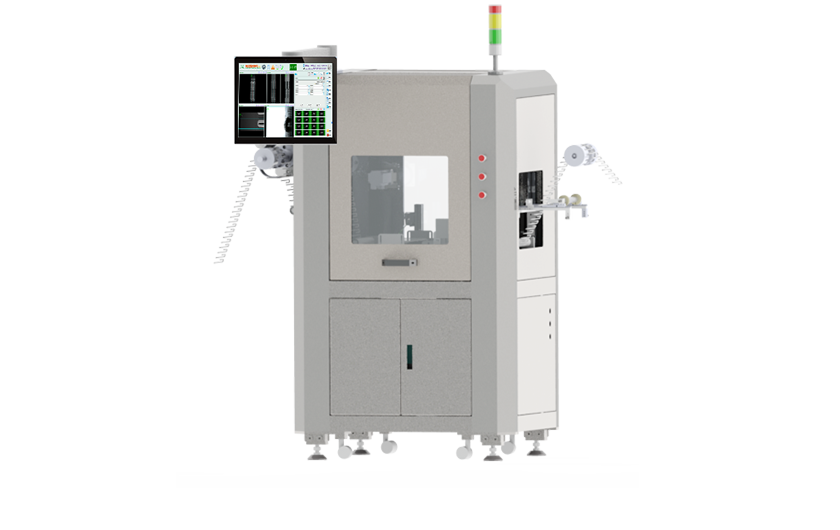
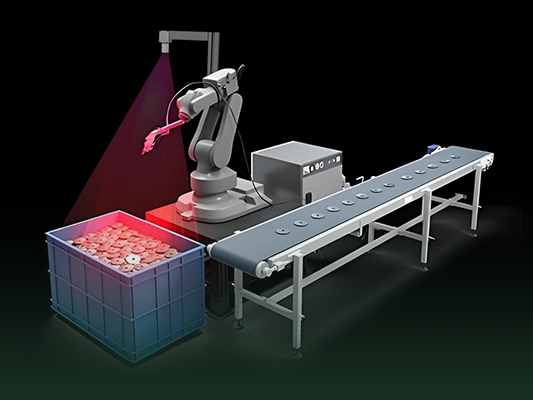
缺陷检测,产品分类
缺陷检测,产品分类
KEYETECH AI+机械手可以抓取、放置待检测产品和搬运缺陷产品,配合控制系统实现自动化检测流程,减少人工干预,提高检测速度和精度。
适用范围:用于对待检测物的前端上料系统或者识别后端的检测物分类。

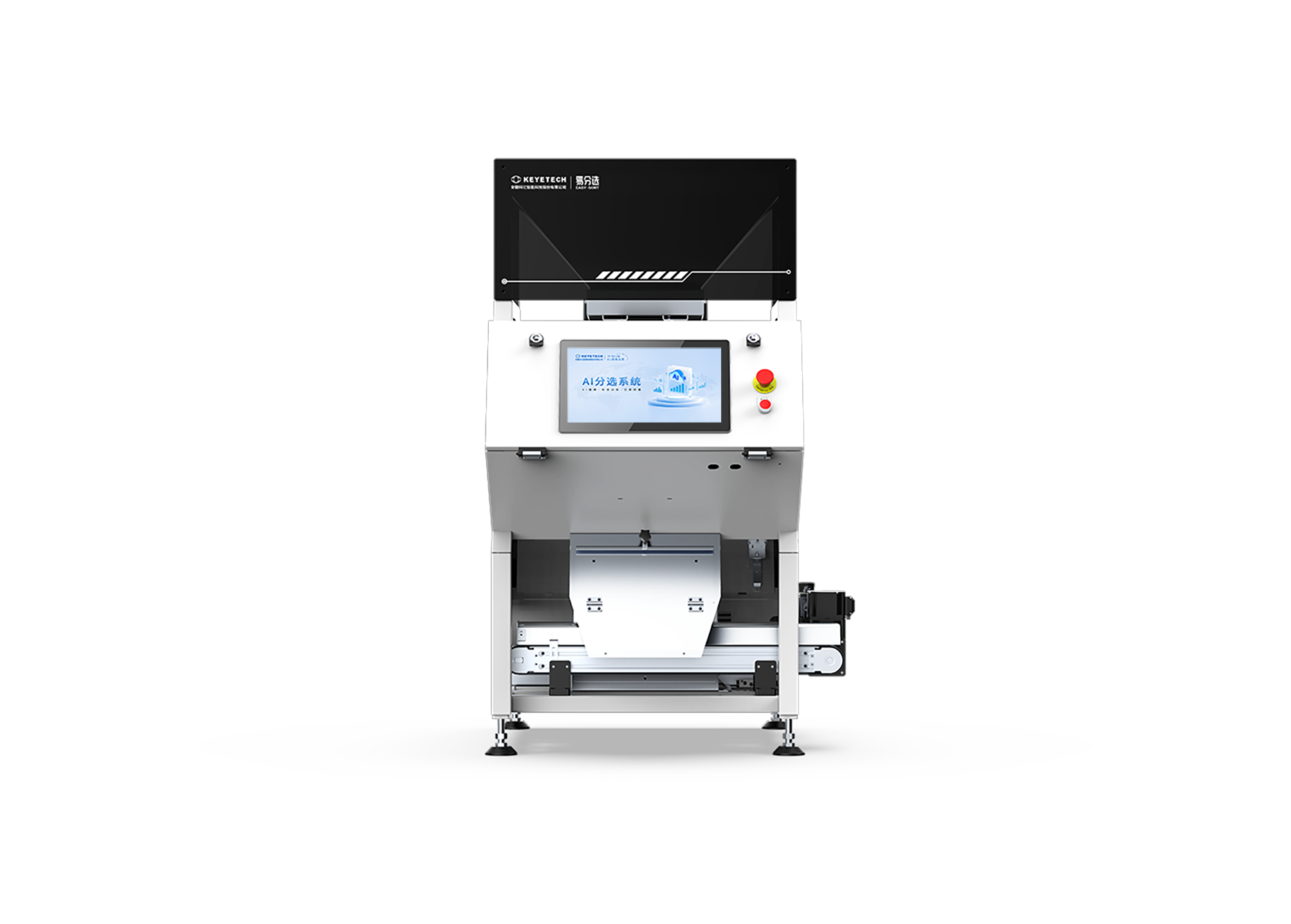
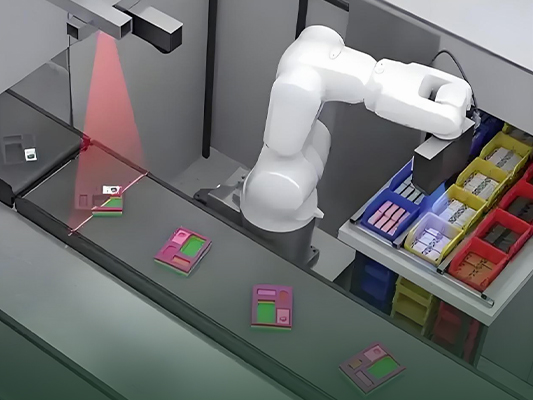
异形件理料、组装、装箱打包
异形件理料、组装、装箱打包
KEYETECH视觉系统对待组装产品进行定位、识别,配合控制系统实现自动抓取、部件组装并在计数后装箱打包;
适用范围:用于对组合产品的无序抓取、定位组装,并对其进行计数后的产品进行装箱打包。
检测视频

物料抓取

玻璃瓶抓取
上一篇应用案例




